For years i’ve been wanting to own my very own arcade game cabinet, like Space Invaders, Pacman and so on. However, these things cost a small fortune and not only they take up a lot of room. Nice to have if you own a large house with plenty of spare room. Then, not so long ago I heard about the RetroPie project. The RetroPie enables you to turn a Raspberry Pi into a retro gaming machine. You can then attach a joystick or game controller and play any retro games you are able to obtain the roms for. Others take their retropie to even greater heights by building a custom built arcade cabinet for it, complete with arcade joysticks and buttons, to make it look like a genuine arcade gaming machine.

When I heard about this I immediately decided I was going to build one. Due to size constraints I did not want to build a full sized cabinet so instead opted for a tabletop cabinet only, in other words only the top section of a standard arcade cabinet. I also wanted the controls to be for two players. At first I was going to design my own cabinet but came across this instructable for a two player bar-top cabinet so decided to use this as a base for my cabinet design. I wasn’t going to follow it rigidly but it was a good starting point.
First I had to decide on a display, I decided to purchase a raw display module rather than use a PC monitor. This is the cheapest way to buy a brand new display without the additional hardware that goes with it. The display I chose was 17″ which was a good size for most games and close to the screen size of a genuine arcade cabinet game. This kind of display requires a VGA adapter board to enable you to interface it with the Raspberry Pi.
Next I had to decide on buttons. I chose 6 buttons per player, plus an additional two buttons per player for 1/2 player select and start. I purchased a two player set of illuminated buttons, plus a
Xin Mo 2 Player USB Interface from Ultracabs. These come with pre-crimped wires and the USB cable.
For sound I chose a cheap Chinese stereo amp with speakers from eBay. The advert claimed it was 100W but I knew this was total nonsense. They were cheap so what the heck. Most of the games I would be playing were only 8 bit retro sound anyway so there was no need to go for a high quality sound system.
Finally I needed some power supplies with enough current to power the Pi, display, illuminated buttons and sound system.



The cabinet was going to be made from MDF and the build started at a Medway Maker session on the 30th June. We set up the tools out in the garden, as it was a nice hot sunny day, and set about cutting and sanding the MDF. Tom Sparrow kindly loaned me a bunch of clamps and his very nice router to do some parts. It took me until 23rd July to completely finish the cabinet and start painting it. It was primed and painted black. The plan is to eventually cover it in graphics and acrylic sheeting to give it a real arcade look (plus to protect it) so the aesthetics are not that important at this stage.

Next came the task of fitting and wiring up all of the buttons. This didn’t take too long despite the fact it looks like an explosion in a wire factory underneath. These were hooked up to the Xi Mo interface which in turn was connected to the Pi. The display was fitted into the cabinet along with the associated VGA interface and power supply. Finally the sound system was fitted. The Raspberry Pi 3B+ was installed along with the RetroPie image on SD Card I had previously installed. Once everything was in place the cabinet was fired up and worked perfectly first time.

mde 
cof
The RetroPie interface is a little clunky to use with just a joystick and buttons (its a lot easier with a keyboard) but you get used to it after a while. There are no games on the RetroPie image, you need to find these yourself. There are plenty of websites dedicatated to preserving old retro game roms and you can get them from there. I was mainly interested in the very old 80’s retro style game classics like Pacman, Galaxians, Defender, Space Invaders and so on so these were the first to be installed.

I did have a lot of trouble with the Xin Mo controller interface getting it to work with the RetroPie as a two player controller. I spent many hours on this and eventually gave up. Apparently they don’t work well on Raspberry Pi 3’s but will work OK on older hardware. The technical info for the unit says it should work, but I just could not get it to work easily. In the end I simply bought a second interface. With the two Xin Mo’s plugged into the Pi they are recognised as two separate controllers and two player games work perfectly.

Overall I am very happy with the build. However, in hindsight if I had to do it again I would have designed my own cabinet. Using someone else’s design is fine if you stick to that design rigidly. But if you want to do something slightly different with it then you start to realise the shortcomings in the design. Maybe i’ll build another one day.

So, the arcade cabinet is up and running and works perfectly. But, the project is not complete. The cabinet itself will be covered in retro gaming graphics and acrylic to protect those. I will also add some black acrylic on various sections to make it look more professional. Finally, I need to make the illuminated marquee to go at the top of the cabinet. I have a neat idea for this so watch this space.
If you want to see the cabinet in person or have a play of some old school retro games on it then pop along to any Medway Makers meetup. The RetroPie will always be set up ready to play when you get there.

 o ensure the robot is not thrown off by shadows. We have yet to test this though!
o ensure the robot is not thrown off by shadows. We have yet to test this though!





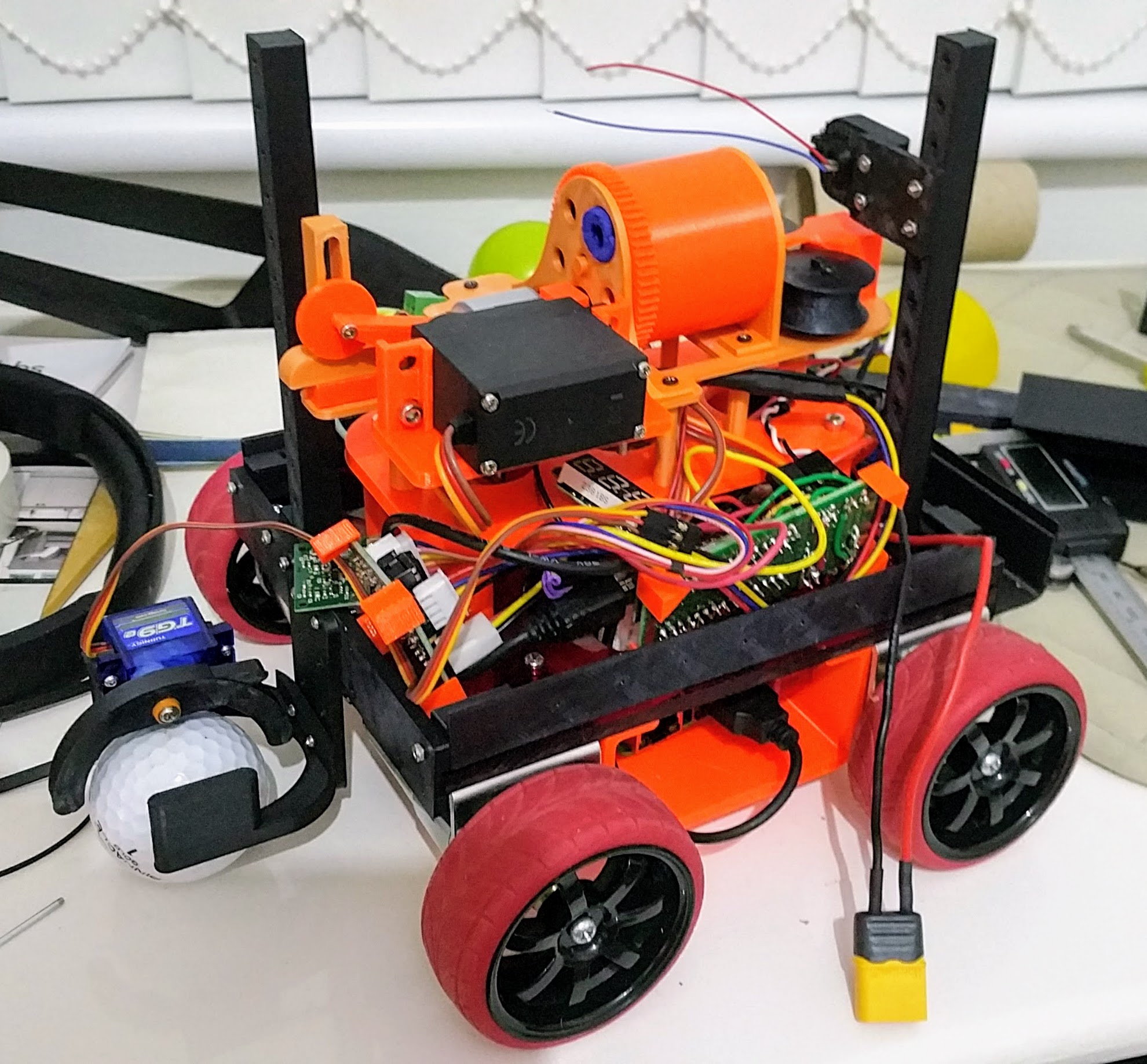
 For this challenge you mount a spike on your robot with 3 balloons attached. The aim is to use your spike to pop the opponents balloons. This challenge is won by a combination of luck, driver experience and robot agility. The robot has got to be able to move quickly and do such maneuvers as spinning on the spot and quick reverses. The driver must be well experienced in controlling his robot. Practice, practice, practice. Ideally find someone else with a similar robot and practice against them.
For this challenge you mount a spike on your robot with 3 balloons attached. The aim is to use your spike to pop the opponents balloons. This challenge is won by a combination of luck, driver experience and robot agility. The robot has got to be able to move quickly and do such maneuvers as spinning on the spot and quick reverses. The driver must be well experienced in controlling his robot. Practice, practice, practice. Ideally find someone else with a similar robot and practice against them. Again, this course is down to driver experience and robot agility. The course is not known until the day of the competition and you get one and one only attempt at the course. The aim is to get through the course as quickly as possible and attempt every obstacle. Points are deducted for rescues or failing an obstacle. Winning robots were not too large, quick and agile with drivers who had obviously practiced well.
Again, this course is down to driver experience and robot agility. The course is not known until the day of the competition and you get one and one only attempt at the course. The aim is to get through the course as quickly as possible and attempt every obstacle. Points are deducted for rescues or failing an obstacle. Winning robots were not too large, quick and agile with drivers who had obviously practiced well. The above 3 challenges are the same as last year (apart from the obstacle course being a different course). The Duck Shoot challenge is entirely new. The aim is to fire 5 soft projectiles at 5 duck targets from behind a line. Most people will undoubtedly go for Nerf Darts and either hack an existing Nerf gun or design a firing mechanism from scratch. Again, driver agility and experience is essential here to aim the ‘gun’ at the target. I like this challenge. It is the first time projectiles have been allowed. Coming up with a nice and reliable mechanism that can fire the darts will be an interesting challenge.
The above 3 challenges are the same as last year (apart from the obstacle course being a different course). The Duck Shoot challenge is entirely new. The aim is to fire 5 soft projectiles at 5 duck targets from behind a line. Most people will undoubtedly go for Nerf Darts and either hack an existing Nerf gun or design a firing mechanism from scratch. Again, driver agility and experience is essential here to aim the ‘gun’ at the target. I like this challenge. It is the first time projectiles have been allowed. Coming up with a nice and reliable mechanism that can fire the darts will be an interesting challenge.
 This is the exact same course as last year with no changes. I think only a few robots successfully navigated the course last year so it is a valid challenge. It is essential for the robot to make its way through the maze as quickly as possible without touching the walls as the times for all 3 runs will be added together. Use of infrared and/or ultrasonic sensors will be required here.
This is the exact same course as last year with no changes. I think only a few robots successfully navigated the course last year so it is a valid challenge. It is essential for the robot to make its way through the maze as quickly as possible without touching the walls as the times for all 3 runs will be added together. Use of infrared and/or ultrasonic sensors will be required here. This is the final challenge and an entirely new one. The robot is placed inside a square arena and has to detect and visit 4 coloured balls in the correct order. There will be now way to do this challenge without a camera and computer vision code (e.g OpenCV). This will be the most challenging of the challenges in my opinion and will require the most advanced code. I think a lot of people will fail this challenge. It will be interesting to see how people fare on the day.
This is the final challenge and an entirely new one. The robot is placed inside a square arena and has to detect and visit 4 coloured balls in the correct order. There will be now way to do this challenge without a camera and computer vision code (e.g OpenCV). This will be the most challenging of the challenges in my opinion and will require the most advanced code. I think a lot of people will fail this challenge. It will be interesting to see how people fare on the day.



")
