
The 7 challenges for the 2018 Pi Wars challenge differ slightly from before. There are a 3 autonomous challenges and 4 that are remote controlled.
For the remote controlled challenges we have: Slightly deranged golf, Pi noon, The obstacle course and The duck shoot.
Slightly Deranged Golf

The golf course is the same course as last year but with a slightly less steep angle for the initial ramp. This is a tiny golf course but has a ramp to contend with at the start, plus a 180 degree u-bend with 2 hazards, then another ramp with a moving windmill before the hole.
A lot of people had trouble with this challenge last year due to: a) the ramp, balls came loose from holders, etc. Having a way of encapsulating the ball on any angle would be beneficial. b) the hazards, the ball going down the ramp would inevitably go into a hazard unless you were able to aim the ball at a wall and make it bounce off at 90 degrees prior to the u-bend. The ball has to either kept in captivity throughout the course or aimed at speed towards a wall prior to the hazard. c) the artificial grass, this made traction difficult for robots with omni-wheels or small wheels. Go for tracks or larger wheels. d) the narrowness of the course. Several robots were very large and found navigating the bend tricky. Smaller robots fared better here. e) The windmill. The blades of the windmill were turning and so the ball had to be fired at the hole at just the right moment. Some kind of solenoid or other device to propel the ball is advantageous.
Pi Noon
 For this challenge you mount a spike on your robot with 3 balloons attached. The aim is to use your spike to pop the opponents balloons. This challenge is won by a combination of luck, driver experience and robot agility. The robot has got to be able to move quickly and do such maneuvers as spinning on the spot and quick reverses. The driver must be well experienced in controlling his robot. Practice, practice, practice. Ideally find someone else with a similar robot and practice against them.
For this challenge you mount a spike on your robot with 3 balloons attached. The aim is to use your spike to pop the opponents balloons. This challenge is won by a combination of luck, driver experience and robot agility. The robot has got to be able to move quickly and do such maneuvers as spinning on the spot and quick reverses. The driver must be well experienced in controlling his robot. Practice, practice, practice. Ideally find someone else with a similar robot and practice against them.
The Obstacle Course
 Again, this course is down to driver experience and robot agility. The course is not known until the day of the competition and you get one and one only attempt at the course. The aim is to get through the course as quickly as possible and attempt every obstacle. Points are deducted for rescues or failing an obstacle. Winning robots were not too large, quick and agile with drivers who had obviously practiced well.
Again, this course is down to driver experience and robot agility. The course is not known until the day of the competition and you get one and one only attempt at the course. The aim is to get through the course as quickly as possible and attempt every obstacle. Points are deducted for rescues or failing an obstacle. Winning robots were not too large, quick and agile with drivers who had obviously practiced well.
The Duck Shoot
 The above 3 challenges are the same as last year (apart from the obstacle course being a different course). The Duck Shoot challenge is entirely new. The aim is to fire 5 soft projectiles at 5 duck targets from behind a line. Most people will undoubtedly go for Nerf Darts and either hack an existing Nerf gun or design a firing mechanism from scratch. Again, driver agility and experience is essential here to aim the ‘gun’ at the target. I like this challenge. It is the first time projectiles have been allowed. Coming up with a nice and reliable mechanism that can fire the darts will be an interesting challenge.
The above 3 challenges are the same as last year (apart from the obstacle course being a different course). The Duck Shoot challenge is entirely new. The aim is to fire 5 soft projectiles at 5 duck targets from behind a line. Most people will undoubtedly go for Nerf Darts and either hack an existing Nerf gun or design a firing mechanism from scratch. Again, driver agility and experience is essential here to aim the ‘gun’ at the target. I like this challenge. It is the first time projectiles have been allowed. Coming up with a nice and reliable mechanism that can fire the darts will be an interesting challenge.
Straight Line Speed Test

The straight line speed test is the same course as last year. However, they have added a narrow section halfway down the course. This is to prevent robots simply hugging the left hand wall and to force a more intelligent way of remaining central. There will be an addition of a white line down the centre so either a line sensor or use of a camera and OpenCV will be essential here.
The Minimal Maze
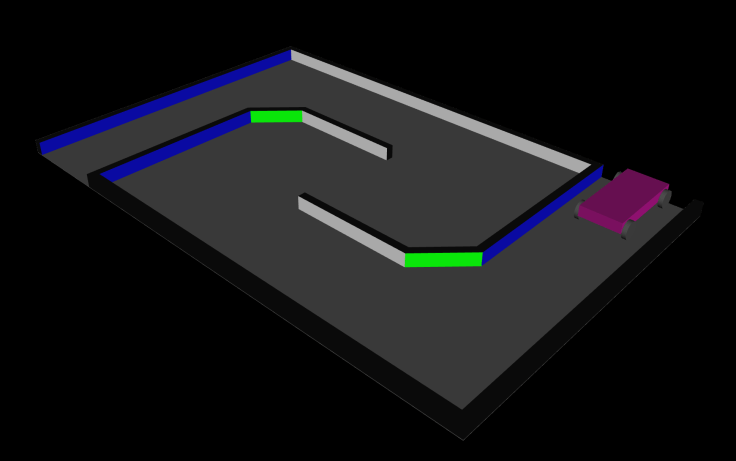 This is the exact same course as last year with no changes. I think only a few robots successfully navigated the course last year so it is a valid challenge. It is essential for the robot to make its way through the maze as quickly as possible without touching the walls as the times for all 3 runs will be added together. Use of infrared and/or ultrasonic sensors will be required here.
This is the exact same course as last year with no changes. I think only a few robots successfully navigated the course last year so it is a valid challenge. It is essential for the robot to make its way through the maze as quickly as possible without touching the walls as the times for all 3 runs will be added together. Use of infrared and/or ultrasonic sensors will be required here.
Somewhere Over The Rainbow
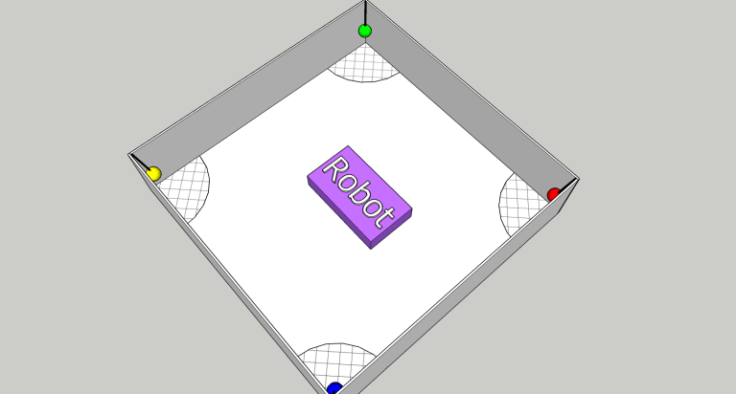 This is the final challenge and an entirely new one. The robot is placed inside a square arena and has to detect and visit 4 coloured balls in the correct order. There will be now way to do this challenge without a camera and computer vision code (e.g OpenCV). This will be the most challenging of the challenges in my opinion and will require the most advanced code. I think a lot of people will fail this challenge. It will be interesting to see how people fare on the day.
This is the final challenge and an entirely new one. The robot is placed inside a square arena and has to detect and visit 4 coloured balls in the correct order. There will be now way to do this challenge without a camera and computer vision code (e.g OpenCV). This will be the most challenging of the challenges in my opinion and will require the most advanced code. I think a lot of people will fail this challenge. It will be interesting to see how people fare on the day.
There are an additional 3 challenges where points can be obtained: Blogging, Technical Merit and Artistic Merit. It will be worth devoting some effort in these areas where possible to get a few extra points.
So there you have it. The 7 (10) challenges for Pi Wars 2018. I really like these challenges. They are a combination of difficult and fun. There will need to be some very careful thought and planning on some challenges, especially the line test, rainbow and duck shoot challenges in my opinion. Planning, designing and building for the challenges are already underway. Keep your eye on this blog for details of our progress leading up to April 2018.

Leave a comment