Hello everyone!
Are you curious about the world of coding but don’t know where to start? Have you ever looked at the matrix of code behind a video game or a website and wondered, “How does it all work?” Or maybe, you’ve thought, “Could I create something like this?”
If you’ve answered “yes” to any of these questions, we have the perfect event for you! Medway Makers invites you to our special gathering on Sunday, 20th August. It’s the perfect opportunity for anyone, yes anyone, to begin their journey into the fascinating world of coding.
Our primary tools are the Arduino, Raspberry Pi, and the Godot Game Engine – three very powerful, yet beginner-friendly platforms that have brought about some of the greatest innovations in technology today. They provide an excellent foundation for beginners and are also rewarding for those with some experience.
But, what if I have never coded before?
Great! Then you’re exactly the person we want to see. At Medway Makers, we believe that everyone can learn to code. In fact, the only requirement to start coding is curiosity and a willingness to learn. It may sound cliché, but with coding, every master truly was once a beginner.
What can I expect?
You’ll be diving right in, working hands-on with Arduino boards and Raspberry Pi microcomputers to create amazing mini-projects that actually work! These platforms are excellent for learning the basics of programming in a fun, practical way.
But the fun doesn’t stop there. You’ll also get to work with the Godot Game Engine. If you’ve ever dreamt of creating your own video game, this is your chance. Godot is a powerful tool that lets you create games right from scratch and it’s perfect for beginners.
Who will be there to guide me?
Our friendly community of Medway Makers is always ready to share their knowledge. Don’t worry if you get stuck, there will always be someone around to help you. You’ll be part of a collaborative and supportive environment, where making mistakes and learning from them is the norm.
Why should I start now?
There’s never been a better time to learn to code. With the increasing digitalization of our world, coding skills are more in-demand than ever before. Coding can boost your problem-solving skills, creativity, and even your career opportunities. Plus, it’s just incredibly satisfying to see your own creation come to life!
But, will I enjoy it?
Absolutely! Coding isn’t just about typing on a computer. It’s about bringing ideas to life, solving puzzles, and creating something from nothing. It’s about the excitement when your project finally works, and the satisfaction of knowing that you made it yourself.
So, come and join us on Sunday, 20th August, at Medway Makers. Bring along your curiosity, creativity, and a sense of adventure. Start your journey in the world of coding and prepare to have lots of fun along the way. We can’t wait to see you there!
No prior experience is required, just an interest in learning and a willingness to have fun. Take the first step on your coding journey with Medway Makers. Mark the date in your calendar, and we’ll see you there!
Discover the joy of coding. Unlock a world of digital possibilities. Join the makers. Your journey starts with us, at Medway Makers.




































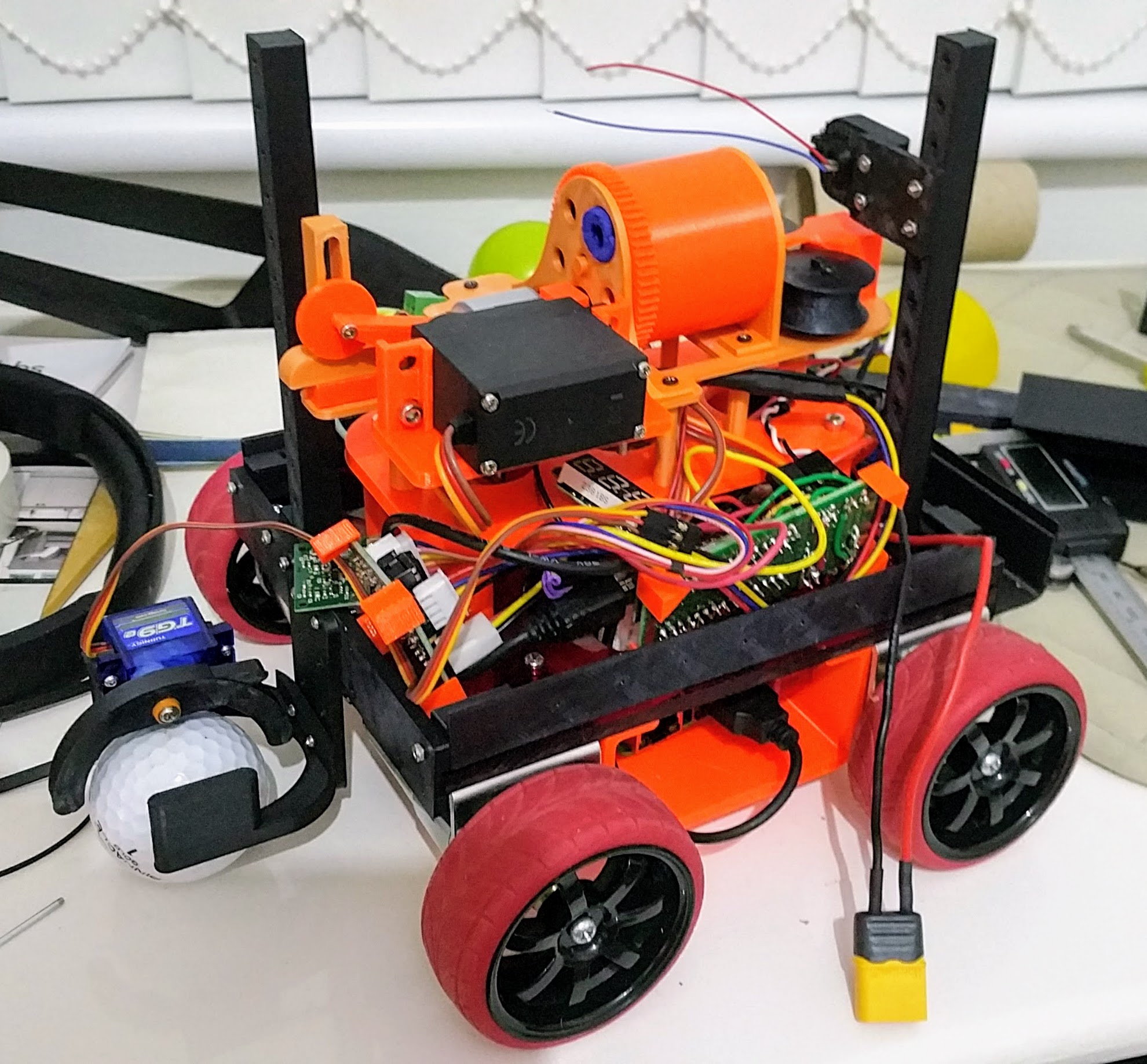 o ensure the robot is not thrown off by shadows. We have yet to test this though!
o ensure the robot is not thrown off by shadows. We have yet to test this though!