
I was saying to Tom yesterday that it is no wonder so many teams drop out of Pi Wars in the first few months. Pi Wars is hard. There is no doubt about it, they are not called “Challenges” lightly. Over the last month or so I have been designing, redesigning, printing and reprinting parts for the Nerf Cannon. We could have gone down the route that lots of other teams have gone down and hacked a Nerf gun, But we chose not to. Those solutions are not elegant, they look ugly as hell, and are not going to win many points for Technical Merit. We chose to design and build a Nerf cannon entirely from scratch.
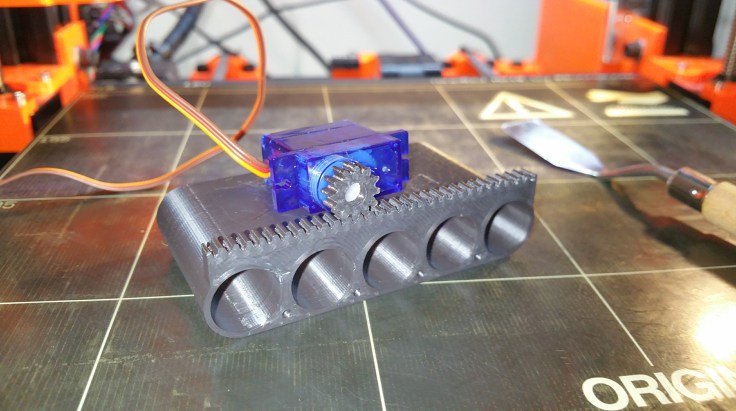
This was hard for two reasons. One, it meant having to learn a CAD program to enable custom built 3D printed parts to be manufactured. Our chosen software is Fusion 360 as it is extremely powerful and allows entire assemblies of multiple parts to be constructed with relative ease. I have gone from a complete beginner in Fusion 360 to a competent intermediate user in the last few months and I am now producing complicated multi-parts devices.
The recent iteration of the Nerf Cannon for the Duck Shoot challenge is made of 13 separate parts. Secondly, once a design is constructed, there are then rounds of testing, tweaking the design or even complete redesigns, reprinting modified parts and so on. Perhaps if I wasn’t such a perfectionist I would ‘make do’ with an inferior solution, but I am keen to get it right. All the work is made much harder as the bulk of the technical aspects of the robot build fall on my shoulders. Fitting time in to get stuff done is tricky.
For the maze challenge, we have used the usual ToF and ultrasonic sensors and the robot is solving the maze in a very respectable time. This one was a lot easier than expected.
Next, we are going to be working on a solution for the golf challenge. I have a few ideas in my head and parts are on the way. The Obstacle Course and Pi Noon will need minimal work apart from plenty of practice as these are manually controlled challenges. Although we may program in some automation if time allows.
The Straight Line Speed Test will be a lot more challenging with the addition of the narrow section in the centre. This will require either slowing down when it gets there or a very efficient centering algorithm. Somewhere Over The Rainbow may prove challenging, we have yet to see.
Finally, at the moment the robot is ugly. It is a basic chassis with a spaghetti mess of wires on top. I would really like to design a nice looking chassis where all of the electronics are hidden away. However, time is running out and this will have to wait until last. There are only 11 weeks left until the competition. Tick tock tick tock !!!


 For this challenge you mount a spike on your robot with 3 balloons attached. The aim is to use your spike to pop the opponents balloons. This challenge is won by a combination of luck, driver experience and robot agility. The robot has got to be able to move quickly and do such maneuvers as spinning on the spot and quick reverses. The driver must be well experienced in controlling his robot. Practice, practice, practice. Ideally find someone else with a similar robot and practice against them.
For this challenge you mount a spike on your robot with 3 balloons attached. The aim is to use your spike to pop the opponents balloons. This challenge is won by a combination of luck, driver experience and robot agility. The robot has got to be able to move quickly and do such maneuvers as spinning on the spot and quick reverses. The driver must be well experienced in controlling his robot. Practice, practice, practice. Ideally find someone else with a similar robot and practice against them. Again, this course is down to driver experience and robot agility. The course is not known until the day of the competition and you get one and one only attempt at the course. The aim is to get through the course as quickly as possible and attempt every obstacle. Points are deducted for rescues or failing an obstacle. Winning robots were not too large, quick and agile with drivers who had obviously practiced well.
Again, this course is down to driver experience and robot agility. The course is not known until the day of the competition and you get one and one only attempt at the course. The aim is to get through the course as quickly as possible and attempt every obstacle. Points are deducted for rescues or failing an obstacle. Winning robots were not too large, quick and agile with drivers who had obviously practiced well. The above 3 challenges are the same as last year (apart from the obstacle course being a different course). The Duck Shoot challenge is entirely new. The aim is to fire 5 soft projectiles at 5 duck targets from behind a line. Most people will undoubtedly go for Nerf Darts and either hack an existing Nerf gun or design a firing mechanism from scratch. Again, driver agility and experience is essential here to aim the ‘gun’ at the target. I like this challenge. It is the first time projectiles have been allowed. Coming up with a nice and reliable mechanism that can fire the darts will be an interesting challenge.
The above 3 challenges are the same as last year (apart from the obstacle course being a different course). The Duck Shoot challenge is entirely new. The aim is to fire 5 soft projectiles at 5 duck targets from behind a line. Most people will undoubtedly go for Nerf Darts and either hack an existing Nerf gun or design a firing mechanism from scratch. Again, driver agility and experience is essential here to aim the ‘gun’ at the target. I like this challenge. It is the first time projectiles have been allowed. Coming up with a nice and reliable mechanism that can fire the darts will be an interesting challenge.
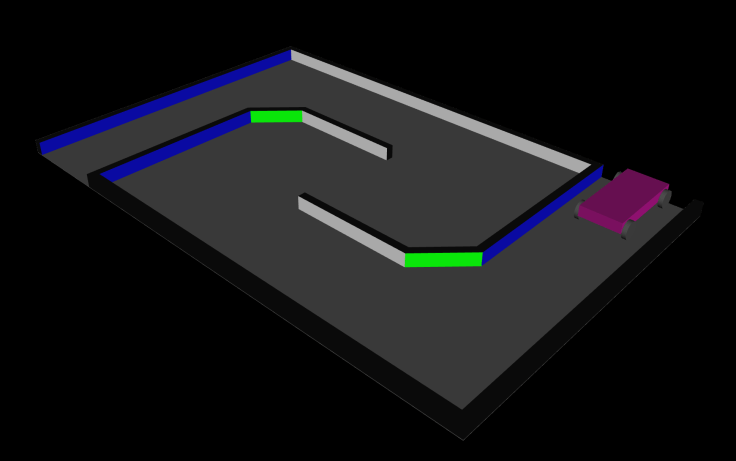 This is the exact same course as last year with no changes. I think only a few robots successfully navigated the course last year so it is a valid challenge. It is essential for the robot to make its way through the maze as quickly as possible without touching the walls as the times for all 3 runs will be added together. Use of infrared and/or ultrasonic sensors will be required here.
This is the exact same course as last year with no changes. I think only a few robots successfully navigated the course last year so it is a valid challenge. It is essential for the robot to make its way through the maze as quickly as possible without touching the walls as the times for all 3 runs will be added together. Use of infrared and/or ultrasonic sensors will be required here.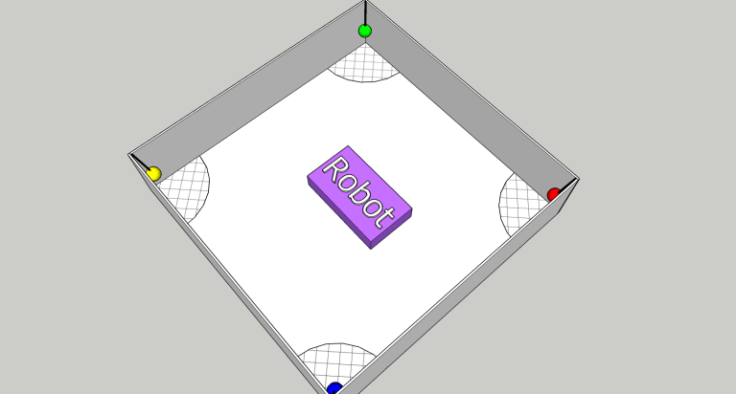 This is the final challenge and an entirely new one. The robot is placed inside a square arena and has to detect and visit 4 coloured balls in the correct order. There will be now way to do this challenge without a camera and computer vision code (e.g OpenCV). This will be the most challenging of the challenges in my opinion and will require the most advanced code. I think a lot of people will fail this challenge. It will be interesting to see how people fare on the day.
This is the final challenge and an entirely new one. The robot is placed inside a square arena and has to detect and visit 4 coloured balls in the correct order. There will be now way to do this challenge without a camera and computer vision code (e.g OpenCV). This will be the most challenging of the challenges in my opinion and will require the most advanced code. I think a lot of people will fail this challenge. It will be interesting to see how people fare on the day.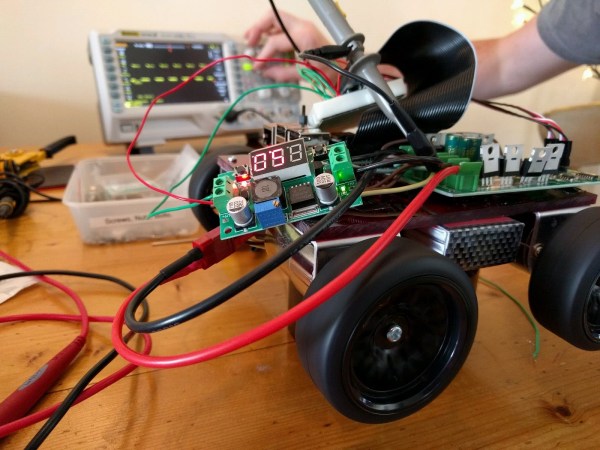



")
